SpeedRunner 54 10/18/15 Flight Data Analysis
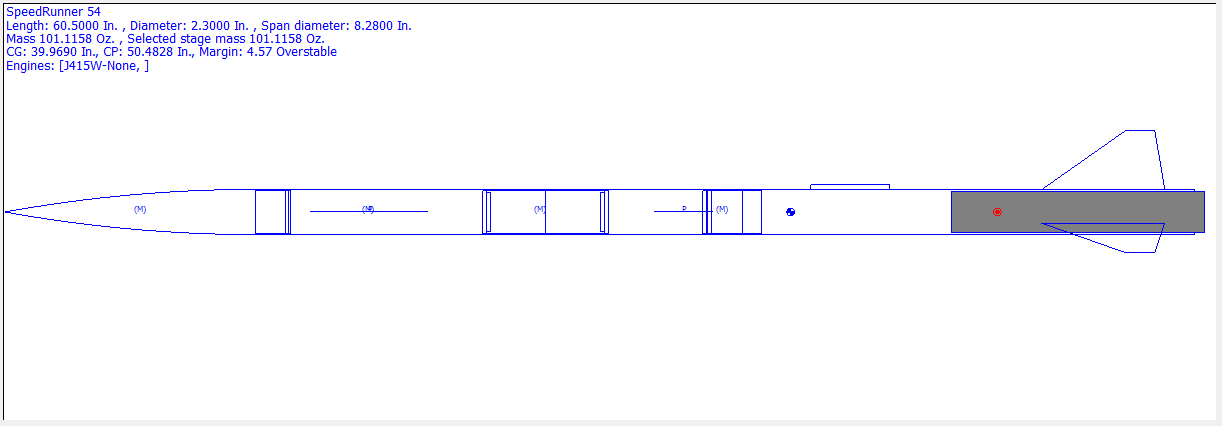
SpeedRunner 54 is a 2 inch minimum diameter, 60 inch long rocket, Made from Performance Rocketry fiberglass tubes and nosecone, and weighing 4 lbs without the motor. It uses two PerfectFlite StatoLoggers for dual/dual deployment mounted in the altimeter bay in the middle of the rocket. A Beeline GPS and the RAF Datalogger were housed in the nosecone, wrapped in bubble wrap.
For this flight, SpeedRunner 75 flew on a three grain Aerotech J415W. SpeedRunner is designed to hold up to a 6 grain (22.8") K700W motor casing.
This was the third flight of SpeedRunner 54. It was flown at the 2015 October Sky launch sponsored by Tripoli Central and held at the Maddox Dairy in Helm, California.
SpeedRunner 54 on its way to 10,600 feet.
A soft landing 2000 feet from the launch pad for another successful flight.
Here is the Beeline GPS generated .kml file, opened in Google Earth, showing the complete profile of the flight.
Here is a link to the Execl Flight Data Analysis spreadsheet with the StratoLogger, Beeline GPS, and RockSim simulation data for this flight of SpeedRunner 54. The Google Earth plot is visually interesting, but the graphs in the spreadsheet have more analytic detail.
For more information on the spreadsheet, see my Sport Rocketry article posted on the Flight Data Analysis page.
The last three tabs of the spreadsheet have the raw data that is used by the Python Visualization program used to create the video below.
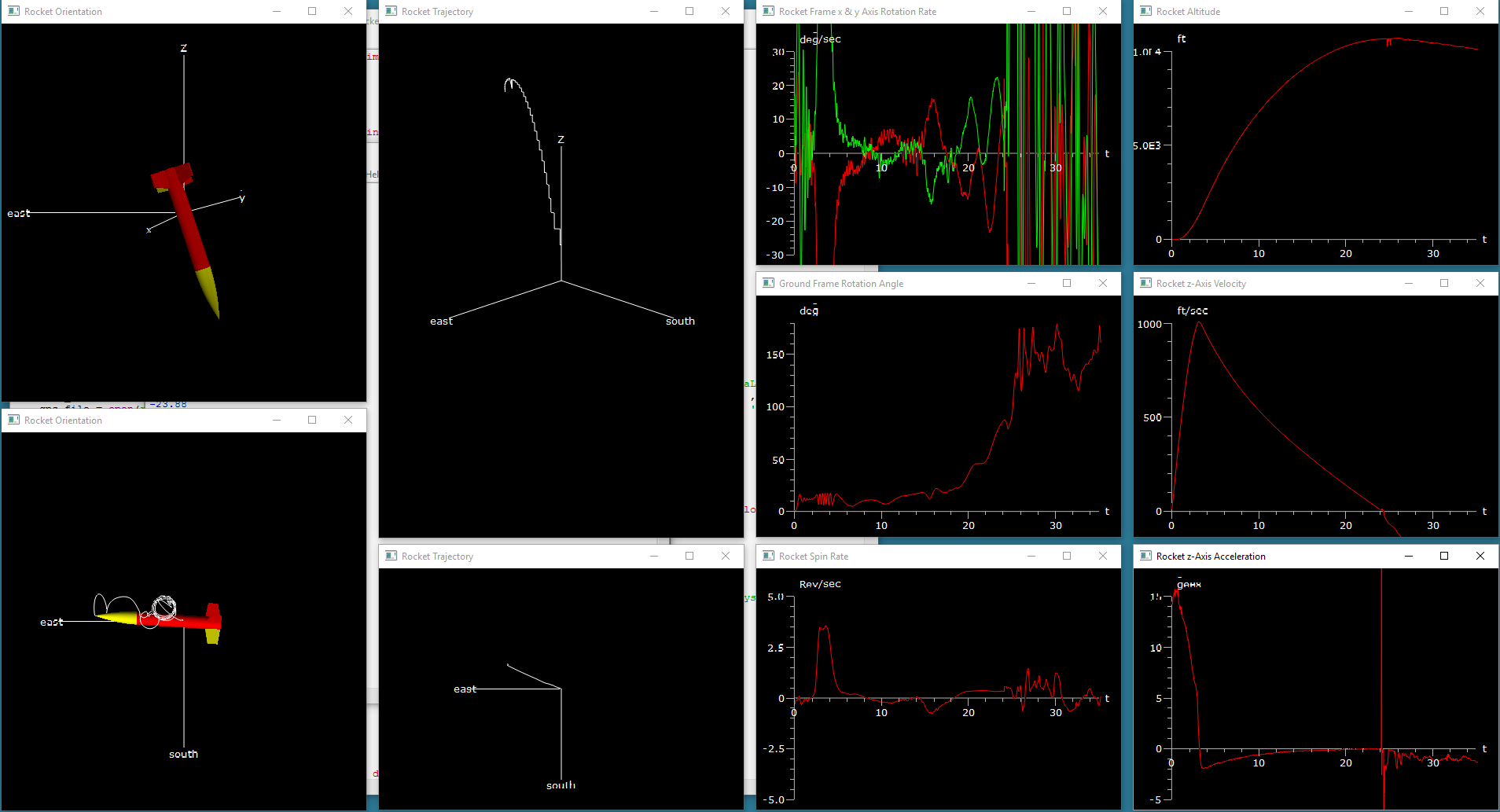
Here is a link to the SpeedRunner 54 flight visualization video. (See the Flight Visualization page for more details on the Python visualization program). Click the picture at the left to enlarge a snapshot of the completed visualization.
The 3-axis rotational rate data and the z-axis acceleration data are from the RAF Data Logger. The Altitude data is the PerfectFlite StratoLogger, and the location data is from the Beeline GPS.
From the Ground Frame Rotation Angle, the rocket makes an initial turn of about 12 degrees that slowly increases mostly toward the end of the coast. Being a long rocket, it has 4.6 calipers of distance between the CG and CP with a smaller J motor, so is very sensitive to the lateral force of a cross-wind until it picks up velocity.
For most of the powered and coast portions of the flight, the spin rate is very low except for the last 1.5 seconds before motor burn-out, when the rocket abruptly spins at 3.5 revolutions per second (rps), and then returns just as abruptly back to close to zero at motor burn-out. During this period of relatively high spin, the tip of the nosecone traces out a near perfect circle.
Clearly, the spin is not due to canted fins. It is most due to likely due to a thrust imbalance in the motor. The J415W uses a multi-throat (medusa) nozzle. The multiple smaller orifices are probably more susceptible to being clogged by combustion debris that can cause a slight thrust imbalance.
Copyright © Thomas Fetter
2014-2026
One minor issue with the recovery - the drogue chute had wrapped itself around the shock chord. The result can be seen in the Flight Data Analysis below. The descent rate starts out at the expected 60 fps, but then increases to 108 fps as the chute lines become wrapped. The rocket thin slows to 29 fps when the man deploys for a safe landing.
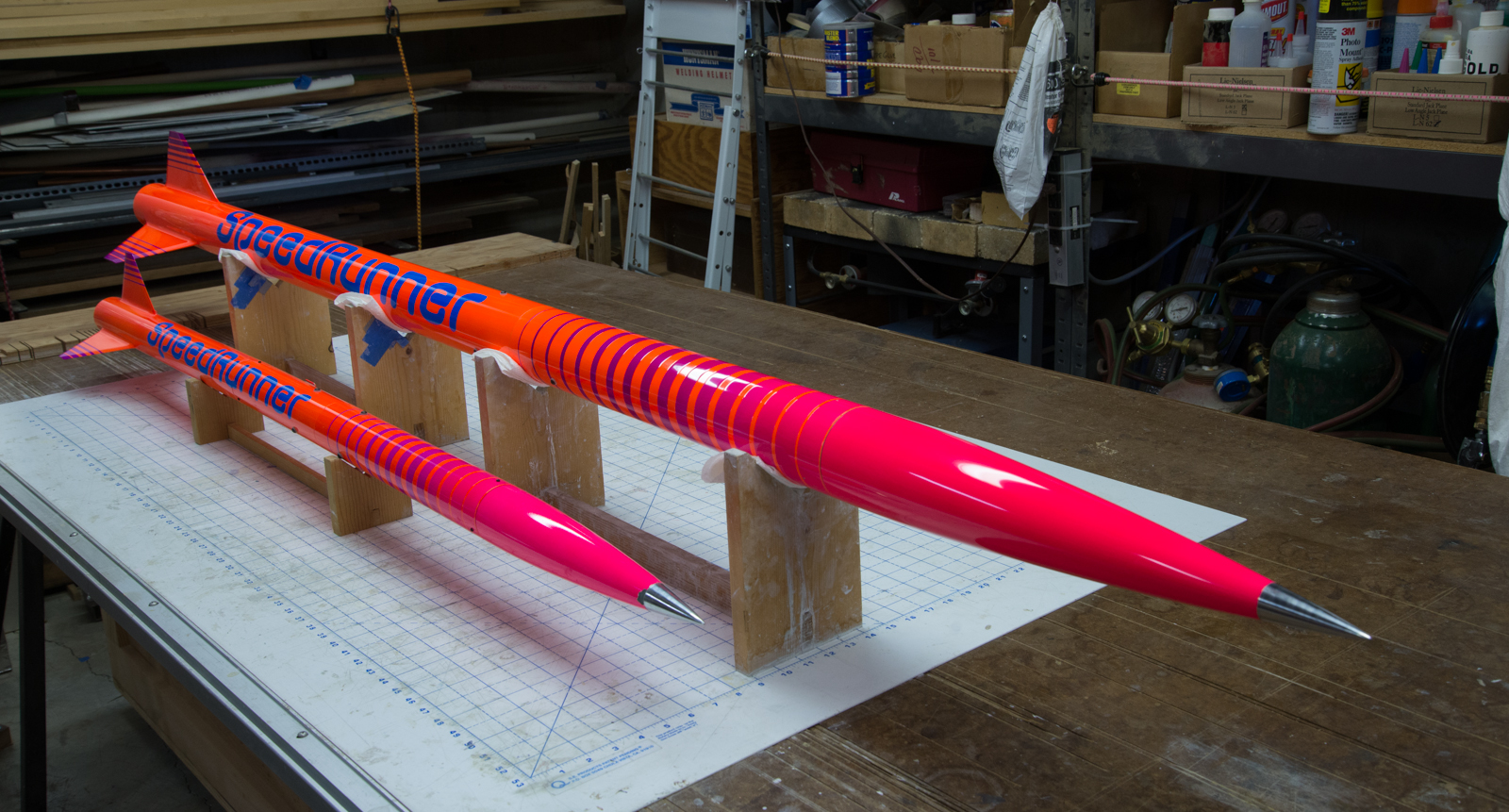
SpeedRunner 54, on the left, below, next to SpeedRunner 75